- « Back to Catalog
iPOS360x SX-CAN 4-Axis Motion System CANopen/Ethernet
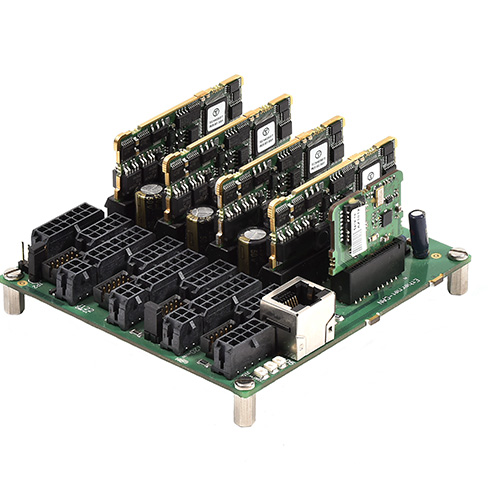
Système à 4 axes sur base iPOS3602 ou iPOS3604
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 12-36 V
Jusqu’à 4 A continu, 10 A pic par axe
Communication CAN entre axes
RS-232 et Ethernet pour la configuration
- Solution compacte (100,3 x 98 x 37 mm) prête à l`emploi pour 2-4 axes.
Alimentation: moteur/puissance: +9 à +36 Vdc; Logique: +7 à +36 Vdc
Courant de sortie:
avec iPOS3604: 4 A continu (mode BLDC), 10 A pic par axe
avec iPOS3602: 2 A continu (mode BLDC), 3,2 A pic par axe
Communication: CAN-bus jusqu`à 1 Mb/s, RS-232 jusqu`à 115 k, et Ethernet 100 Mb/s
Protocoles CAN: CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0) ou TMLCAN Technosoft, sélectionnable par un cavalier
Options de livraison: 1-4 variateurs intelligents iPOS3602 VX ou iPOS3604 VX, chacun offrant:
Commande haute performance de moteurs rotatifs ou linéaires aec ou sans balais ou pas-à-pas
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Commande en position, vitesse ou couple
Options de rétroaction: codeurs incrémentaux ou différentiels RS-422, codeurs sinus / cosinus 1 Vpp, capteurs Hall numériques ou linéaires
Modes de fonctionnement: profils de position et de vitesse; PVT et PT interpolés, engrenage et came électronique, référence externe: analogique ou envoyée via un bus de communication
Programmation de mouvement en TML (Technosoft Motion Language) ou à l`aide des bibliothèques de fonctions pour Windows (VC / VB / Labview), Linux et divers PLC
Fonctionnement autonome de programmes de mouvement complets résidant dans la mémoire du variateur
5 entrées numériques: 5-36 V (compatibles avec les sorties NPN): Enable, 2 fins de course et 2 universelles
3 sorties numériques, 5-36 V, 0,2 A: Prêt, Erreur, 1 universelle
2 entrées analogiques: 12-bit, 0-5 V: référence, feedback ou universelle
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Codeur incrémental analogique sinus / cosinus (différentiel 1 Vpp)
Capteurs Hall numériques et linéaires
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surintensités, courts-circuits, défauts à la terre, sur- ou sous-tensions, I2t, erreurs de commande - Supply Voltage:
- 12 V,24 V,36 V
- Output Current - Nominal:
- 4x4 A
- Continuous/Peak Current:
- 2/3 A,4/10 A
- Communication:
- RS-232,CANopen / TMLCAN,Ethernet
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Sensors:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Motion Control:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Digital Inputs:
- 4x5
- Digital Outputs:
- 4x4
- Analog Inputs:
- 4x2
-


iPOS360x SX – Fiche technique
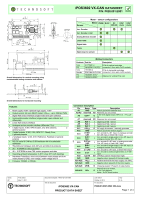
iPOS3604 VX-CAN – Fiche technique
iPOS3602 VX-CAN – Fiche technique
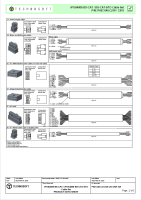
iPOS360x SX-CAN – Set de câbles -

iPOS360x SX Multi-axis – Manuel d`utilisation - EasyMotion Studio Demo
TML Motion Librairies
CANopen manuel de programmation
CANopen EDS fichiers -


iPOS360x SX Multi-axis – Diagramme de connexion - P028.002.E884 – iPOS360x MBX-CAN motherboard (4 axes, iPOS360x VX, CAN)
P028.002.E894 – iPOS360x MBX-NET motherboard (4 axes, iPOS360x VX, Ethernet compatible)
P038.022.E001 – ENET-VX interface (Ethernet plug-in)
P028.040.C179 – HC 4 x iPOS360x SX (housing & crimp pin set for the MBX 4-axis motherboard)
P028.040.C198 – CCS 4 x iPOS360x SXE (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, single-ended encoder feedback, I/O)
P028.040.C199 – CCS 4 x iPOS360x SXD (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, diff. encoder feedback, I/O)
P034.001.E002 – EasyMotion Studio (software)
iPOS360x SX-CAN 4-Axis Motion System CANopen/Ethernet
- Solution compacte (100,3 x 98 x 37 mm) prête à l`emploi pour 2-4 axes.
Alimentation: moteur/puissance: +9 à +36 Vdc; Logique: +7 à +36 Vdc
Courant de sortie:
avec iPOS3604: 4 A continu (mode BLDC), 10 A pic par axe
avec iPOS3602: 2 A continu (mode BLDC), 3,2 A pic par axe
Communication: CAN-bus jusqu`à 1 Mb/s, RS-232 jusqu`à 115 k, et Ethernet 100 Mb/s
Protocoles CAN: CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0) ou TMLCAN Technosoft, sélectionnable par un cavalier
Options de livraison: 1-4 variateurs intelligents iPOS3602 VX ou iPOS3604 VX, chacun offrant:
Commande haute performance de moteurs rotatifs ou linéaires aec ou sans balais ou pas-à-pas
Commande sinusoïdale (FOC) ou trapézoïdale (Hall) des moteurs sans balais
Commande en boucle ouverte ou en boucle fermée de moteurs pas-à-pas biphasés et triphasés
Commande en position, vitesse ou couple
Options de rétroaction: codeurs incrémentaux ou différentiels RS-422, codeurs sinus / cosinus 1 Vpp, capteurs Hall numériques ou linéaires
Modes de fonctionnement: profils de position et de vitesse; PVT et PT interpolés, engrenage et came électronique, référence externe: analogique ou envoyée via un bus de communication
Programmation de mouvement en TML (Technosoft Motion Language) ou à l`aide des bibliothèques de fonctions pour Windows (VC / VB / Labview), Linux et divers PLC
Fonctionnement autonome de programmes de mouvement complets résidant dans la mémoire du variateur
5 entrées numériques: 5-36 V (compatibles avec les sorties NPN): Enable, 2 fins de course et 2 universelles
3 sorties numériques, 5-36 V, 0,2 A: Prêt, Erreur, 1 universelle
2 entrées analogiques: 12-bit, 0-5 V: référence, feedback ou universelle
Codeurs supportés:
Codeur incrémental quadruple (monotour, collecteur ouvert et différentiel)
Codeur incrémental analogique sinus / cosinus (différentiel 1 Vpp)
Capteurs Hall numériques et linéaires
Configuration et programmation faciles avec la plate-forme logicielle EasyMotion Studio
Protection contre les surintensités, courts-circuits, défauts à la terre, sur- ou sous-tensions, I2t, erreurs de commande Système à 4 axes sur base iPOS3602 ou iPOS3604
Pour moteurs avec ou sans balais et pas-à-pas
Alimentation moteur / logique: 12-36 V
Jusqu’à 4 A continu, 10 A pic par axe
Communication CAN entre axes
RS-232 et Ethernet pour la configuration- Analog Inputs:
- 4x2
- Supply Voltage:
- 12 V,24 V,36 V
- Communication:
- RS-232,CANopen / TMLCAN,Ethernet
- Controlled Motors:
- DC Brushless,DC Brushed,Linear,Stepper,Voice Coil
- Digital Inputs:
- 4x5
- 4x4
- Digital Outputs:
- Control Functions (Position-Speed-Torque),Electronic Gearing,Electronic Camming
- Motion Control:
- 4x4 A
- Output Current - Nominal:
- Incremental,1Vpp Sin/Cos,Digital Halls,Analog Halls,Tacho,Sensorless
- Sensors:
- 2/3 A,4/10 A
- Continuous/Peak Current:
-
iPOS360x SX – Fiche technique
iPOS3604 VX-CAN – Fiche technique
iPOS3602 VX-CAN – Fiche technique
iPOS360x SX-CAN – Set de câbles -
iPOS360x SX Multi-axis – Manuel d`utilisation - EasyMotion Studio Demo
TML Motion Librairies
CANopen manuel de programmation
CANopen EDS fichiers -
iPOS360x SX Multi-axis – Diagramme de connexion - P028.002.E884 – iPOS360x MBX-CAN motherboard (4 axes, iPOS360x VX, CAN)
P028.002.E894 – iPOS360x MBX-NET motherboard (4 axes, iPOS360x VX, Ethernet compatible)
P038.022.E001 – ENET-VX interface (Ethernet plug-in)
P028.040.C179 – HC 4 x iPOS360x SX (housing & crimp pin set for the MBX 4-axis motherboard)
P028.040.C198 – CCS 4 x iPOS360x SXE (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, single-ended encoder feedback, I/O)
P028.040.C199 – CCS 4 x iPOS360x SXD (Complete cable set, 100 cm, for the MBX 4-axis system: power, RS232, CAN, motor, diff. encoder feedback, I/O)
P034.001.E002 – EasyMotion Studio (software)